
Verification of inverse kinematic equations for a five-axis machine tool with a spindle tilting configuration
Published 2022-06-30
abstract views: 405 // Full text article (PDF): 156
Keywords
- Verification,
- Inverse kinematics,
- Simulation,
- Virtual machine tools
How to Cite

This work is licensed under a Creative Commons Attribution 4.0 International License.
Abstract
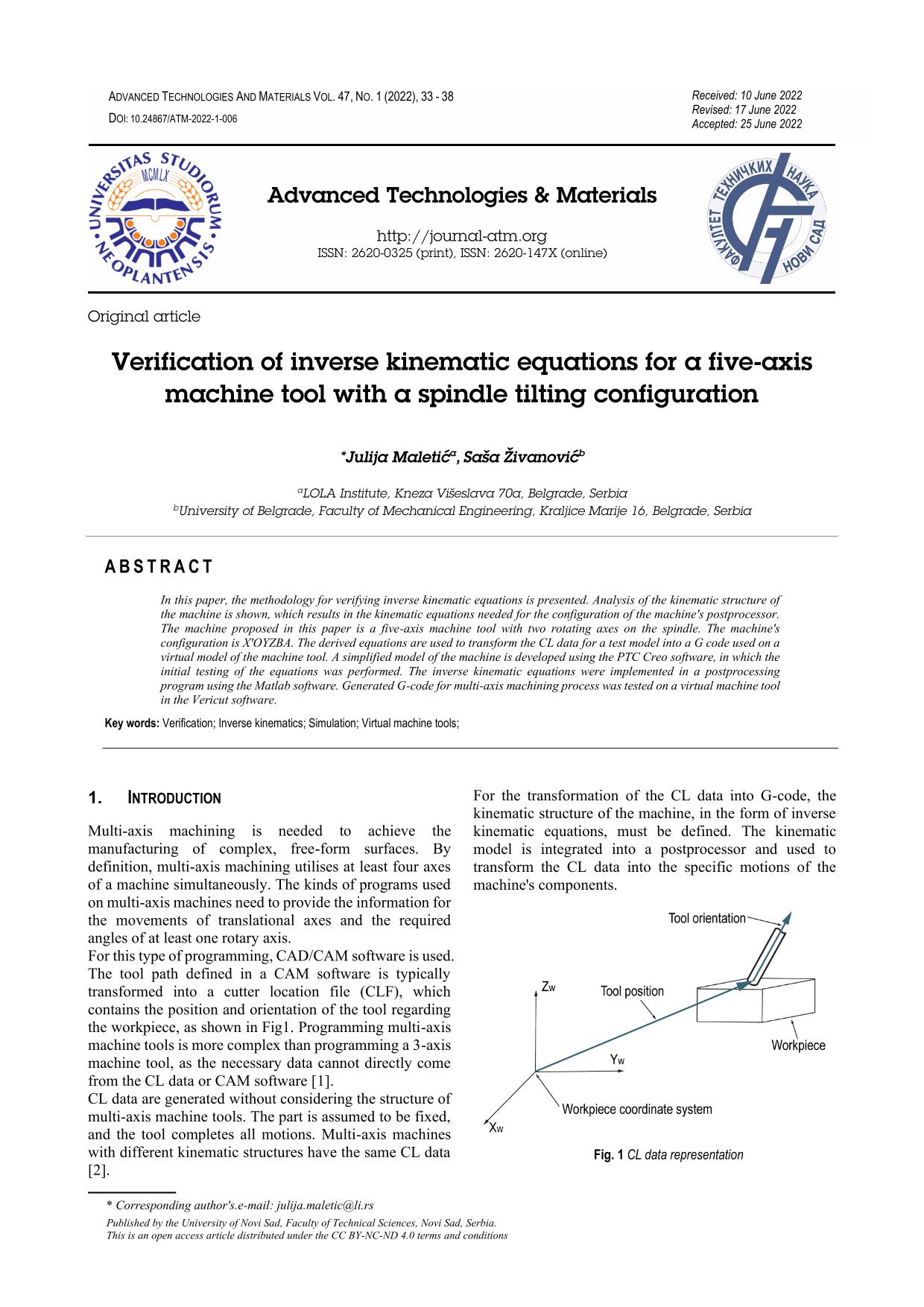
In this paper, the methodology for verifying inverse kinematic equations is presented. Analysis of the kinematic structure of the machine is shown, which results in the kinematic equations needed for the configuration of the machine's postprocessor. The machine proposed in this paper is a five-axis machine tool with two rotating axes on the spindle. The machine's configuration is X'OYZBA. The derived equations are used to transform the CL data for a test model into a G code used on a virtual model of the machine tool. A simplified model of the machine is developed using the PTC Creo software, in which the initial testing of the equations was performed. The inverse kinematic equations were implemented in a postprocessing program using the Matlab software. Generated G-code for multi-axis machining process was tested on a virtual machine tool in the Vericut software.
